top of page
MEGR 3090: Design Webpage
By: Joseph Petite
PROJECT PHASE 1
LESSONS LEARNED
-
During this project I learned how wire a Dual H-Bridge Motor Driver (L298N) to a Raspberry Pi and how to control the DC Motors connected to it through the parameters set in Limit OS.
-
Though this project I learned how to solder both a solid core wire and a stranded wire to electrical components such as a DC motor.
-
Another thing I learned through this assignment was how connect, utilize, and live view a camera through Limit OS. This includes both connecting and enabling the camera on the Raspberry Pi as well as activating it through Limit OS.
-
Last but not least, I learned the pin configuration of Motor Driver, how they work, and what they are utilized for.
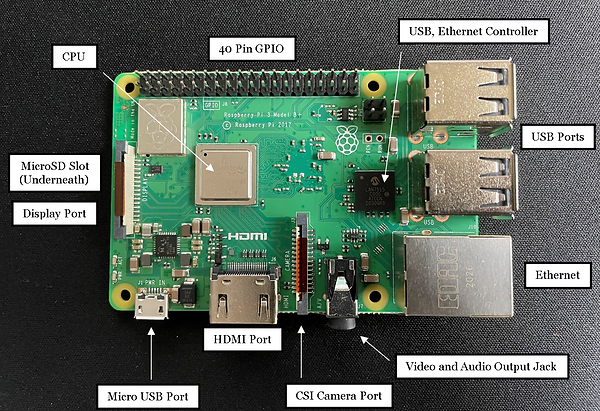
RASPBERRY PI + MOTOR
DRIVER BREAKDOWN


ROBOT CHASSIS

ROBOT SCHEMATIC

SOLDERING MOTORS

ROBOT CIRCUIT

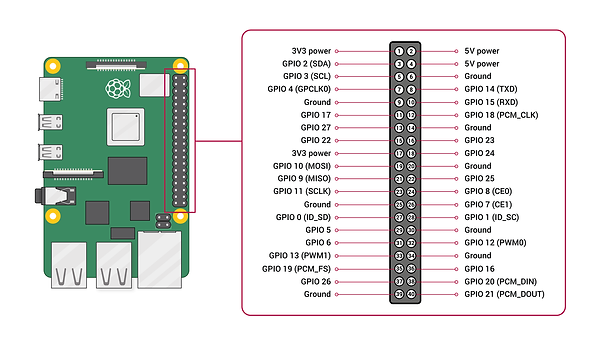
PIN SETUP


FINAL ROBOT


ROBOT VIDEO
SOURCES
bottom of page