MEGR 3090: Design Webpage
By: Joseph Petite
PROJECT PHASE 3
Going into Phase 3 of this course I decided to take on a whole new approach to internet controlled robotics. I feel that through the completion of various previous assignments I have become very comfortable with both Python and Raspberry Pi as well as controlling them over the internet through means such as Blynk and human activated responses. It is for these reasons that I decided to broaden my horizons as well as my newfound knowledge by incorporating it into a new medium. The platform I intend to use for this part of the course is autonomous robotics used to navigated courses or avoid objects.
LESSONS LEARNED
-
The first thing I learned through this assignment was how to format code to represent decision making and reaction.
-
The next thing I learned through this project was how to improve my utilization of functions. Doing this has allowed me to streamline my code into a short and concise code loop.
-
Another thing I learned was how to effectively alter a robots reaction to continuously changing landscape and, in real time, make decisions for what the best course of action may be.
-
The last thing I learned was how critical battery drain can be and how it can severely alter actions with calculated times.
3D MODELING
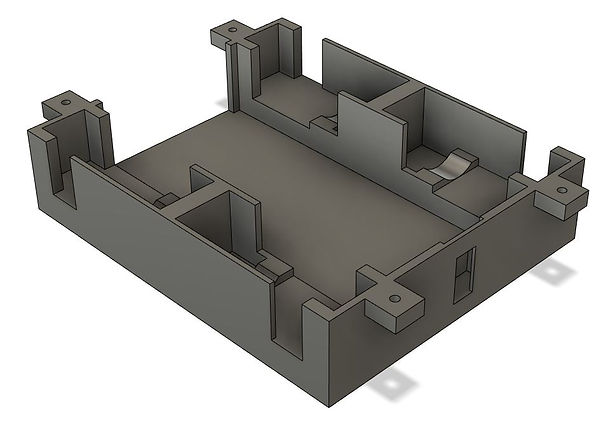
3D Model for the Base of the Chassis

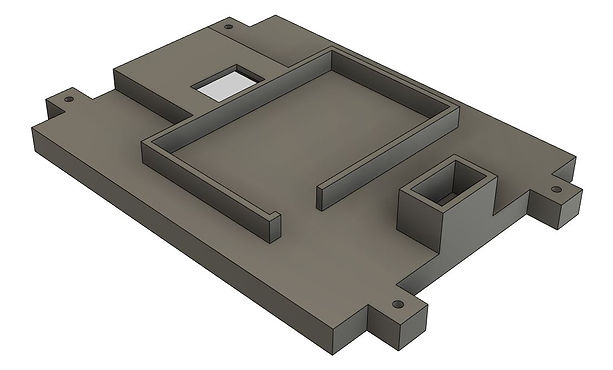
3D Model for the Top of the Chassis

3D Model for the Base of the Chassis w/ DC Motors

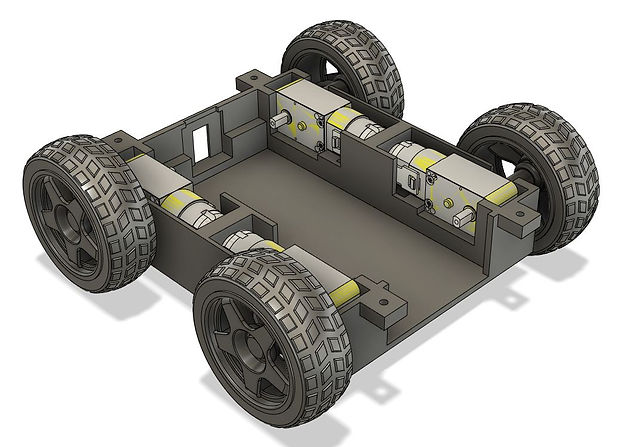
3D Model for the Base of the Chassis w/ All Lower Components


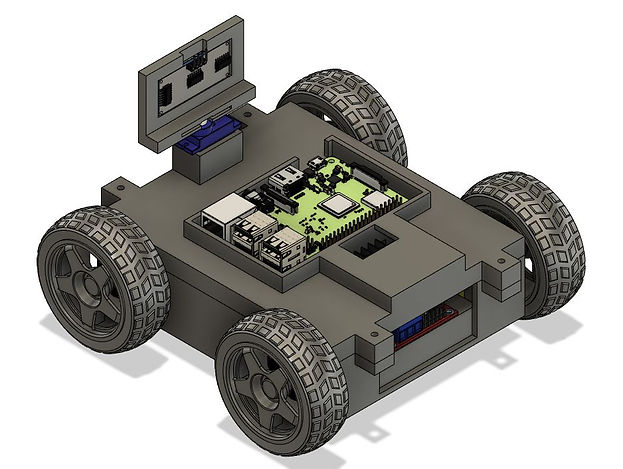
3D Model for Full Robot w/ All Components

DISTANCE DETERMINATION SYSTEM
ULTRASONIC SENSOR
Breadboard Circuit for Ultrasonic Sensor

Physical Circuit for Ultrasonic Sensor

Code for Ultrasonic Sensor


Ultrasonic Sensor in Action
SERVO MOTOR
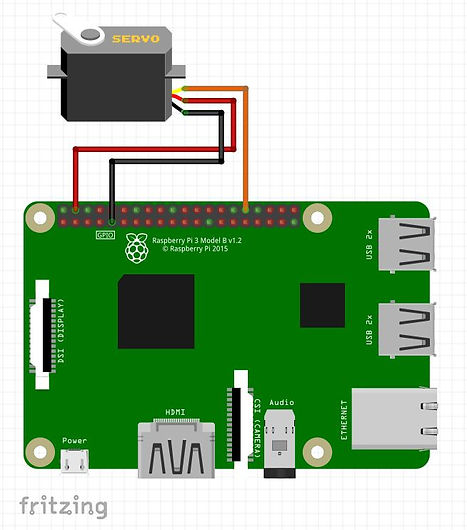
Breadboard Circuit for Servo Motor
Physical Circuit for Servo Motor

Code for Servo Motor


Servo Motor in Action
FINAL DISTANCE DETERMINATION SYSTEM
Breadboard Circuit for Distance Determination System

Physical Circuit for Distance Determination System

Code for Distance Determination System


Distance Determination System in Action
DC MOTOR CONTROL
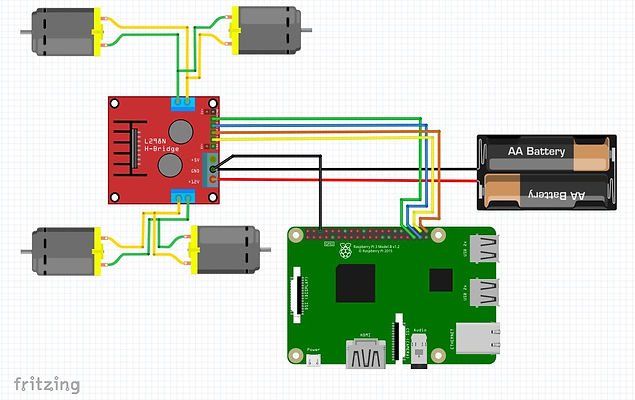
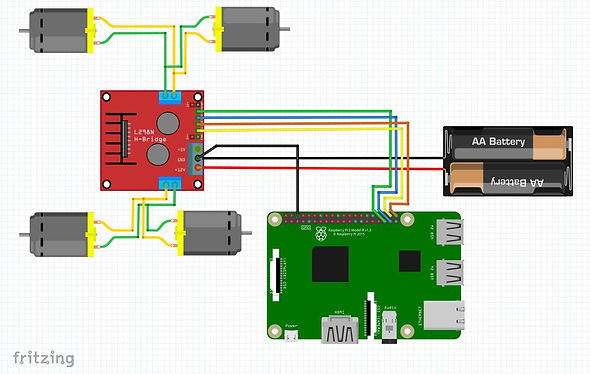
Breadboard Circuit for DC Motors
Physical Circuit for DC Motors

Code for DC Motors


DC Motors in Action
DISTANCE
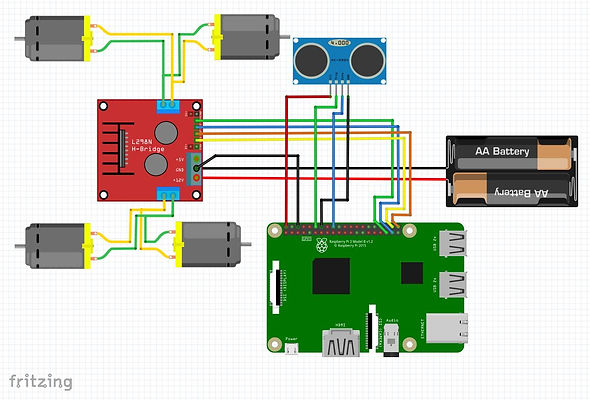
Breadboard Circuit for DC Motors and Ultrasonic Sensor
Physical Circuit for DC Motors and Ultrasonic Sensor

DC Motors and Ultrasonic Sensor in Action
LIVE CAMERA W/ BLYNK
Blynk Widget Setup


Live Camera Feed Physical Setup

Live Camera Feed Code


Camera Feed
DC MOTOR ROTATIONAL TEST
Breadboard Circuit for DC Motors
Physical Circuit for DC Motors

Code for DC Motor Turn Test


Turn Test
FINAL PHASE 3 ROBOT
w/ BLYNK
Breadboard Circuit for Final Robot

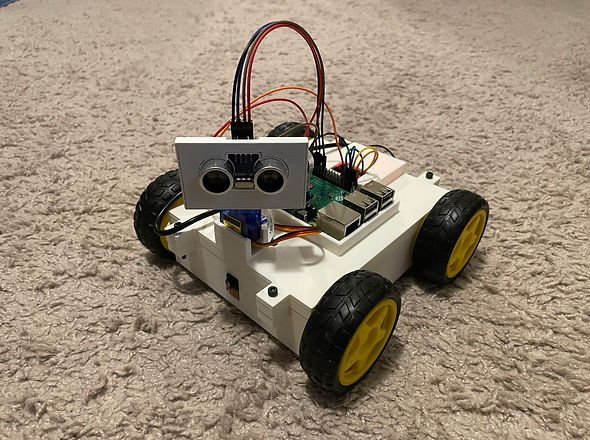
Final Physical Robot
CODE FOR FINAL PHASE 3 ROCKET
Code for Physical Movement




Live Camera Feed Code
Master Code to Run Both Sets of Code

Final Robot in Action